(文/文彩平)随着点胶工业需求的持续不断的发展,点胶机器人被普遍的使用。针对传统点胶机器人空间性、灵活性不足的行业性问题,深圳市世椿智能装备股份有限公司(简称世椿智能)推出“工业机器人+3D视觉技术”柔性点胶解决方案,为客户提供点胶精度、可靠性和自动化水平更高的服务。

世椿智能“工业机器人+3D视觉技术”的成功结合带来了许多关键性突破,包括高精度定位和导航、智能识别和检测、高灵活性、高适应性、高协作性等,改善了工业生产的效率、准确性和安全性,在提升工业制造业的竞争力和发展方面发挥了重要作用。
在人工智能、机器人、生物识别、物联网等产业加快速度进行发展的背景下,制造业人机一体化智能系统转型不断深入,机器视觉技术愈发受到关注。业内人士指出,在中国制造2025和工业4.0双重影响下,中国机器视觉市场火爆,预计未来五年将会以每年20%平均增长率持续增长。工业机器人是中国乃至全球制造业发展的重要支撑,而3D视觉作为工业机器人之眼,对工业机器人的行业应用前景产生深远影响。据Grand View Research预测,到2027年,全球3D机器视觉市场规模预计将达到34.6亿美元,3D机器视觉强劲的技术价值将成为推动市场持续增长的重要因素。
目前,市场自动化程度慢慢的升高,机器视觉在工业中已得到普遍应用。机器视觉对于提高工业机器人的灵活性和可操作性具备极其重大意义,在大批量工业生产过程中,3D视觉助力机器人实现更多高精度动作,拓宽其应用场景,也大幅度的提升了生产效率和柔性化程度。通过学习和分析三维图像数据,工业机器人能适应不同的物体形状和尺寸,自动调整姿势以完成各种任务,成功地应用在对复杂的工件表面上进行精确的涂覆,无惧复杂图案、紧密贴合等难题。通过3D视觉控制技术可以提高工业机器人工作的精度、速度及可靠性,“工业机器人+3D视觉技术”配套发展成为市场关注的焦点。
基于客户产品的个体差异性较大,且产品工作端面为异形小间距端面,传统点胶技术无法满足需求,世椿智能综合机器人的灵活性与3D视觉技术自适应性,展开了“工业机器人+3D视觉技术”的结合探索,开发出了“工业机器人+3D视觉技术”的相关设备、系统、软件及模块,以适应不一样的生产需求,并成功落地应用,积累起大量客户与典型案例。
基于多年的点胶工艺沉淀,世椿智能坚持技术创新进化,历经多个阶段,在产品应用和解决方案协同层面,组合打造快速柔性部署、便捷维护、更具创新价值的“工业机器人+3D视觉技术”柔性点胶解决方案,在智能制造多行业多场景应用上实现落地,为客户带来降本增效提质等实际服务价值。
在“工业机器人+3D视觉”技术积累阶段,世椿智能进行了市场调研和技术评估,确定了机器人点胶和3D视觉技术的潜在应用和需求。同时,其也进行了相关技术的学习和培训,为后续的研发工作做好了充足的积淀和准备;在“工业机器人+3D视觉技术”开发阶段,世椿智能进行了机器人点胶和3D视觉技术的结合攻关工作。首先,研发团队进行了相关算法和软件工具的开发,用于实现机器人对目标物体进行识别和定位;其次,研发团队进行了硬件系统的设计和集成,包括激光扫描器、摄像头、机器人等设备的选型及调试;最后,研发团队还进行了系统的测试和优化,以确保系统的稳定性和可靠性;在“工业机器人+3D视觉”技术集成和应用阶段,世椿智能开始进行机器人点胶+3D视觉技术的集成和应用。通过与客户密切合作,世椿智能在实际生产环境中安装和调试系统,根据客户需求进行定制化的开发,及时解决技术上的问题并作调整。
在“工业机器人+3D视觉技术”的更新迭代过程中,世椿智能还面临了如下难点和问题:一是算法的研发和优化,机器人点胶+3D视觉技术需要精确地进行物体识别和定位,因此算法的研发和优化是一个关键的难点。公司需要投入大量的人力和资源来开发和改进算法,以提高系统的准确性和稳定性;二是硬件设备的选择和集成,在机器人点胶+3D视觉技术中,选择合适的硬件设备并进行集成是一个复杂且庞大的工作。不同的环境和应用需求可能需要不同类型的激光扫描器、摄像头和机器人等设备,公司需要仔细评估不同的选项,并进行设备的调试和集成;三是实际生产环境的适应性,机器人点胶+3D视觉技术需要在实际生产环境中进行应用,而不同的生产环境可能存在各种挑战和变化,公司需要针对不同的环境进行系统的优化和调整,以确保系统的稳定性和可靠性
为了解决以上难点和问题,世椿智能采取了以下策略:一是打造强大的“工业机器人+3D视觉技术”研发团队,包括算法工程师、硬件工程师和应用工程师等不同领域的专业人员,他们具有丰富的经验和技术知识,能够应对各种挑战;二是建立维系紧密的合作伙伴关系,公司与技术供应商、战略客户深度合作,协同解决技术问题和改进系统,推进行业智能化、自动化升级;三是持续改进和优化,公司致力于持续精进机器人点胶+3D视觉技术,通过不断的测试和验证,发现并解决系统中存在的问题。同时,公司也积极收集用户的反馈和需求,根据实际应用情况进行技术上的调整和改进。
综上所述,在机器人点胶+3D视觉技术研发中,世椿智能经历了技术积累、开发、集成和应用等重要阶段和过程。在技术及设备的更新迭代过程中,世椿智能还面临算法研发和优化、硬件设备的选择和集成、实际生产环境的适应性等难点和问题。通过强大的研发团队、紧密的合作伙伴关系和持续改进和优化的策略,世椿智能成功攻克了这些难点,并持续提供稳定可靠的机器人点胶+3D视觉技术解决方案。
在全球产业转型加速,少人化趋势以及政策倾斜综合影响下,机器人作为自动化、无人化应用的通用智能载体,凭借提升工作效率、降低劳力成本等优势,高效替代了传统行业机械重复、高强度、招工难的工作,落地愈发增量扩面。
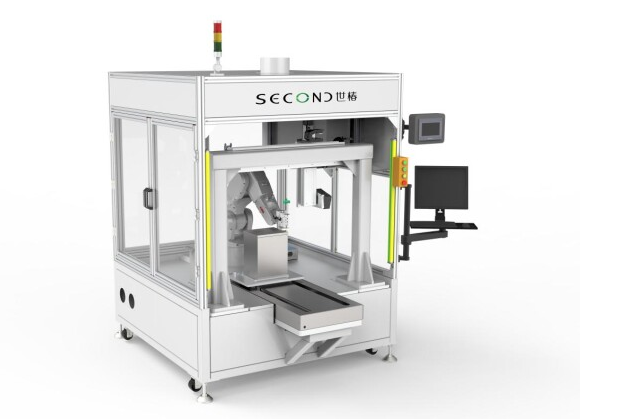
针对“工业机器人+3D视觉技术”柔性点胶解决方案,世椿智能研发的主要设备为SEC-NRB-6700,控制系统包括机器人控制柜+工控机+PLC综合控制,软件为世椿自主研发点胶软件、3D视觉自动引导软件,所包含模块为工业机器人、3D视觉模块、点胶系统、应用于机器人上的称重模块、对针模块、移栽组件等,具有高精度(3D线扫相机引导机器人)、自适应性(有效解决产品变形)等技术特点,具有极高的产品兼容性,可应对复杂产品的点胶需求。
机器人采用国际知名的ABB IRB 1200机器人,IRB 1200第二轴无外凸,这一创新设计使其具有比其他小型机器人更长的行程,大幅缩短了机器人与工件之间的距离,而不影响其优异性能。标配IP40防护等级,可选洁净室、IP67或铸造专家II代防护等级。4条气管、10路用户信号线及以太网线,从手腕法兰到底座全程内部走线。能以任意角度安装,机身小巧,有效工作范围大。
3D线扫相机采用立体视觉系统能够对视场范围内的标靶进行自动识别定位,可在复杂的背景环境下实现系统的现场标定。通过对运动体上特征点的识别定位并对数据进行分析进一步获取运动体的位置、三维坐标、姿态、特征点之间的相对距离。

随着机器人+应用走进更多场景,让机器人摆脱机械固定模式限制,智能、柔性、交互的需求越发普遍。世椿智能“工业机器人+3D视觉技术”柔性点胶解决方案,以其高精度、高一致性、高效率、高灵活性、高适应性、低成本和实现数据分析和质量控制的特点,成为现代工业点胶生产中的重要工具,助力工业自动化迈向新的高度。
未来,世椿智能持续聚焦“工业机器人+3D视觉技术”,将围绕算法、硬件、数据集、实践应用四个方面开展“深耕行动”:一是持续优化算法,世椿智能将致力于改进机器人点胶+3D视觉技术的算法,提高点胶精度和效率,以适应不一样的工件形状、材料和工艺要求;二是持续改进硬件,世椿智能将不断改进和优化机器人点胶+3D视觉技术所需的硬件设备,如3D相机、机械臂等,以提高系统性能和稳定能力;三是数据集建设,世椿智能将积极收集和建立丰富的数据集,用于训练和优化机器人点胶+3D视觉技术的模型,提高其识别和定位的准确性;四是提高实践应用领域,世椿智能将与合作伙伴和行业用户深度合作,将机器人点胶+3D视觉技术应用于实际生产中,不断积累经验并提升技术的可行性和实用性。
为了持续精进,世椿智能将密切关注最新的科技发展和行业趋势,与相关专家和机构保持深度合作,参与技术研讨会和学术交流,不断吸收先进的研究成果和思路,并将其应用于研发技术和实践应用中。同时,世椿智能也将关注用户需求和反馈,持续改进和优化设备、控制管理系统、软件及模块,提供全球技术领先的高性能产品和优秀的解决方案,为“工业机器人+3D视觉技术”开拓更为广阔的应用空间。
【广告】免责声明:本内容为广告,相关素材由广告主提供,广告主对本广告内容的真实性负责。本网发布目的是传递更加多信息,并不代表本网赞同其观点和对其真实性负责,广告内容仅供读者参考。
新闻信息服务许可证音像制品出版许可证广播电视节目制作经营许可证网络视听许可证网络文化经营许可证